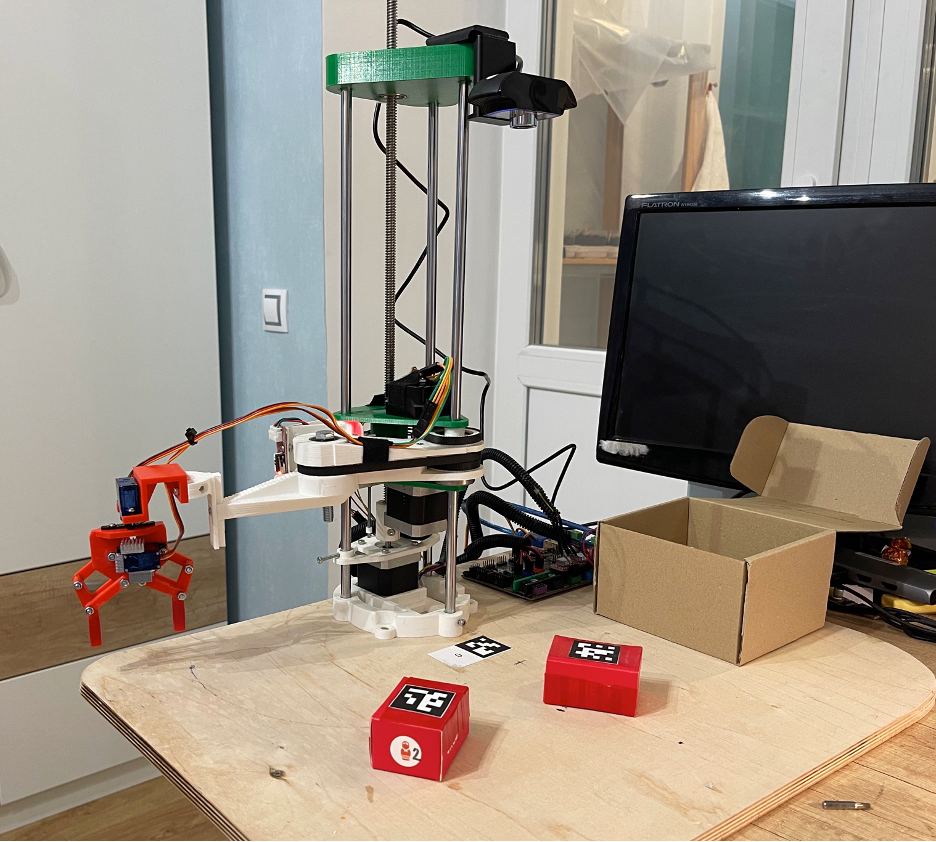
The robot manipulator which uses python and opencv to sort and pack small shipments with ARUCO markers
To create simillar one you need to:
- Install Python and OpenCV
- Print SCARA robot manipulator parts
- Assemble SCARA
- Create controllable gripper
- Connect everthing to MARLIN board and firmware with cartesian config
- Setup Webcam right on the top of the z axis to have a full view of SCARA workspace
- Connect everything to laptop
- Create ARUCO tags
- Enter ARUCO tags into the algo
- Place boxes and ENJOY!!!
BEFORE use you need to calibrate your camera by creating YAML file. You need to use chessboard and start CameraCalibration.py
You can test accuracy of your calibration by starting DetectAruco.py. You will see ARUCO markers detection!
You can use any scara robot manipulator. The most important part is to measure lengths of arm and forearm of your SCARA and you will be fine!